我的方塊新增器 | 樂高機器人EV3使用說明
我的方塊新增器
有時會新增一個很棒的迷你程式,需要在其他專案或程式中再次使用它。
“我的方塊新增器”可幫助採用此迷你程式,這是一些在工作區域中選擇的方塊,將它們組合在一起以新增“我的方塊”。
隨著時間的推移,可以建立一個“我的方塊”庫,可以與其他 MINDSTORMS 用戶進行交換。
“我的方塊新增器”可幫助採用此迷你程式,這是一些在工作區域中選擇的方塊,將它們組合在一起以新增“我的方塊”。
隨著時間的推移,可以建立一個“我的方塊”庫,可以與其他 MINDSTORMS 用戶進行交換。
假設已新增了一個使機器人按方形驅動的迷你程式:
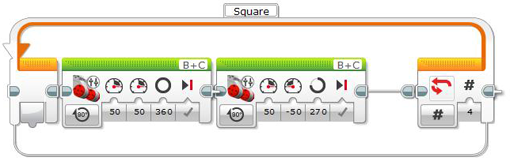
要將此迷你程式轉換爲方塊,請使用“選擇”工具,並通過拖動一個框圍繞所有所需方塊來選擇它們。
從“工具”選單中選擇“我的方塊新增器”以啓動“我的方塊新增器”。
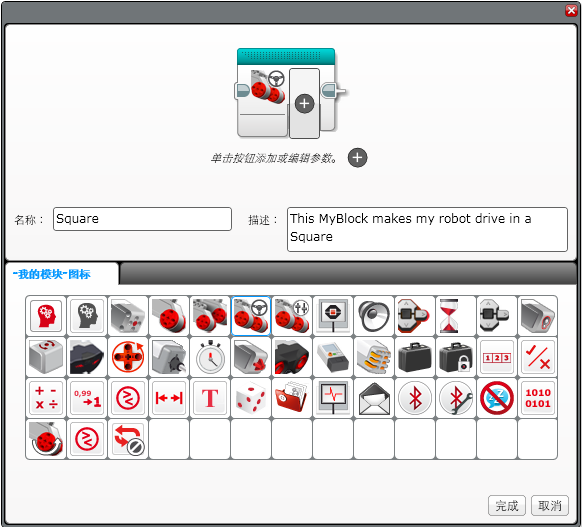
爲方塊提供名稱和簡短描述。
選擇一個“我的方塊”圖標以幫助標識方塊。此範例使機器人按方形驅動,因此會使用帶有馬達的圖標。
單擊“完成”。
迷你程式現在會轉換爲其自己的方塊!爲專案新增的所有“我的方塊”都會出現在“我的方塊”面板中。
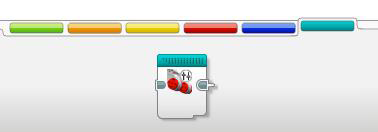
可以將新“我的方塊”拖動到程式畫面上以在程式中使用它。

如果要編輯“我的方塊”的任何部分,請雙擊它。
要將此迷你程式轉換爲方塊,請使用“選擇”工具,並通過拖動一個框圍繞所有所需方塊來選擇它們。
從“工具”選單中選擇“我的方塊新增器”以啓動“我的方塊新增器”。
爲方塊提供名稱和簡短描述。
選擇一個“我的方塊”圖標以幫助標識方塊。此範例使機器人按方形驅動,因此會使用帶有馬達的圖標。
單擊“完成”。
迷你程式現在會轉換爲其自己的方塊!爲專案新增的所有“我的方塊”都會出現在“我的方塊”面板中。
可以將新“我的方塊”拖動到程式畫面上以在程式中使用它。
如果要編輯“我的方塊”的任何部分,請雙擊它。
剛才爲形成方形而新增的“我的方塊”非常棒,但是如果需要更大的方形該怎麽辦呢?或是如果希望機器人更快地按方形驅動呢?如果需要三角形該怎麽辦呢?
可以進入“我的方塊”,每次更改輸入,不過有一種更好的方式。
設定迷你程式,如同對第一個“我的方塊”所執行的操作一樣:選擇所需方塊,然後在“工具”選單中選擇“我的方塊新增器”以啓動“我的方塊新增器”。
填寫所有部分,如同對第一個“我的方塊”所執行的操作一樣,只是不要馬上單擊“完成”。而是單擊“我的方塊”上的“+”符號以增加參數。
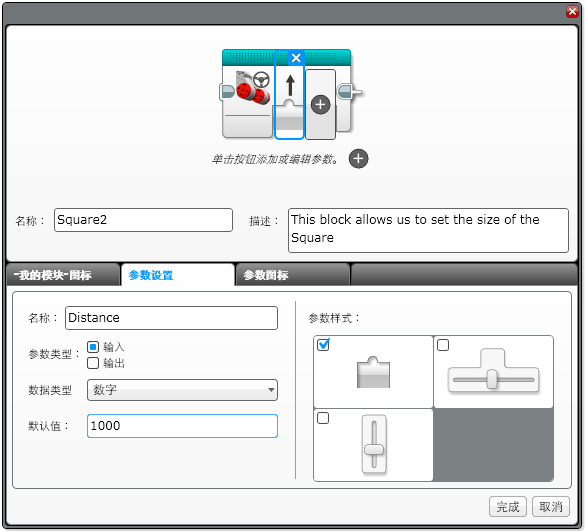
在“參數設定”選項卡中,填寫合適資訊。這會使我們可以控制方形的大小。
設定一個“預設值”,如 1000,以防在自己的程式中使用“我的方塊”時忘記設定它。甚至可以爲參數選擇移動指標條樣式。
在“參數圖標”選項卡中,爲參數選擇合適圖片。在此實例中,我們控制機器人在形成方形時將驅動的距離,因此直箭頭似乎比較合適。
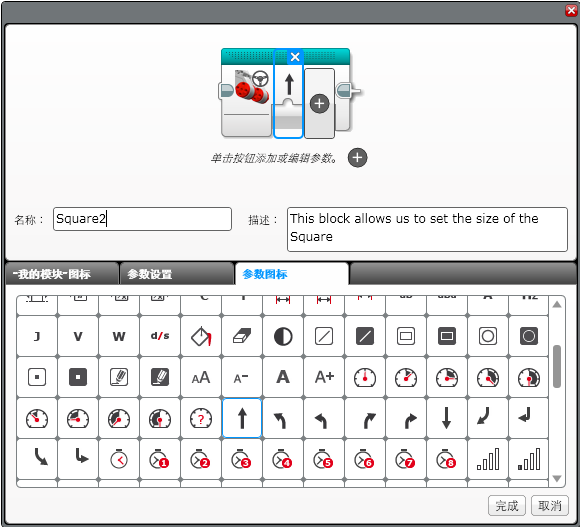
現在已增加了參數,請單擊“完成”。
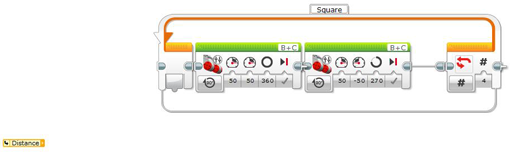
新參數“距離”需要先連接到迷你程式中的輸入,然後才能控制它。
將來自參數“距離”的線連接到第一個移動坦克方塊的“度數”輸入。這會使我們可以控制機器人將驅動的方形的大小(有關更多資訊,請參考資料線)。
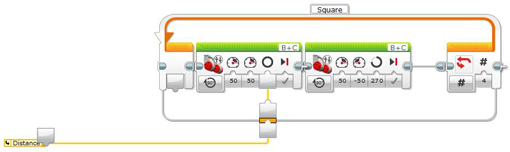
返回主程式,現在會看到“我的方塊”,但是此時具有一個參數用於設定方形迷你程式的邊長。根據上面所選的“參數樣式”,可以直接輸入值或使用移動指標條。
或是如果希望機器人按三角形或六角形驅動該怎麽辦?
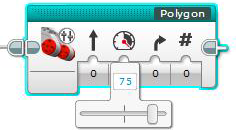
此處是同一個“我的方塊”,但是此時具有用於控制以下方面的參數:
1.針對每條邊驅動的距離(“距離”)。
2.機器人行進的速度(“速度”)。
3.針對每個角轉彎的角度,以及
4.重覆驅動命令的次數。

可以進入“我的方塊”,每次更改輸入,不過有一種更好的方式。
設定迷你程式,如同對第一個“我的方塊”所執行的操作一樣:選擇所需方塊,然後在“工具”選單中選擇“我的方塊新增器”以啓動“我的方塊新增器”。
填寫所有部分,如同對第一個“我的方塊”所執行的操作一樣,只是不要馬上單擊“完成”。而是單擊“我的方塊”上的“+”符號以增加參數。
在“參數設定”選項卡中,填寫合適資訊。這會使我們可以控制方形的大小。
設定一個“預設值”,如 1000,以防在自己的程式中使用“我的方塊”時忘記設定它。甚至可以爲參數選擇移動指標條樣式。
在“參數圖標”選項卡中,爲參數選擇合適圖片。在此實例中,我們控制機器人在形成方形時將驅動的距離,因此直箭頭似乎比較合適。
現在已增加了參數,請單擊“完成”。
新參數“距離”需要先連接到迷你程式中的輸入,然後才能控制它。
將來自參數“距離”的線連接到第一個移動坦克方塊的“度數”輸入。這會使我們可以控制機器人將驅動的方形的大小(有關更多資訊,請參考資料線)。
返回主程式,現在會看到“我的方塊”,但是此時具有一個參數用於設定方形迷你程式的邊長。根據上面所選的“參數樣式”,可以直接輸入值或使用移動指標條。
或是如果希望機器人按三角形或六角形驅動該怎麽辦?
此處是同一個“我的方塊”,但是此時具有用於控制以下方面的參數:
1.針對每條邊驅動的距離(“距離”)。
2.機器人行進的速度(“速度”)。
3.針對每個角轉彎的角度,以及
4.重覆驅動命令的次數。
提示和技巧
可以在“我的方塊新增器”中對方塊更改參數順序。單擊左或右箭頭可移動所選參數。
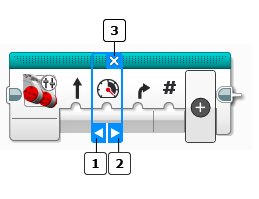
 參數左移
參數左移
 參數右移
參數右移
 刪除參數
刪除參數